Tripod Piezoelectric Robot Motion Analysis with PID Control
piezoelectric actuation · micro crawling robot · dynamics · tripod robot · variable cross-section beam · Panasonic HG-C1030
Overview
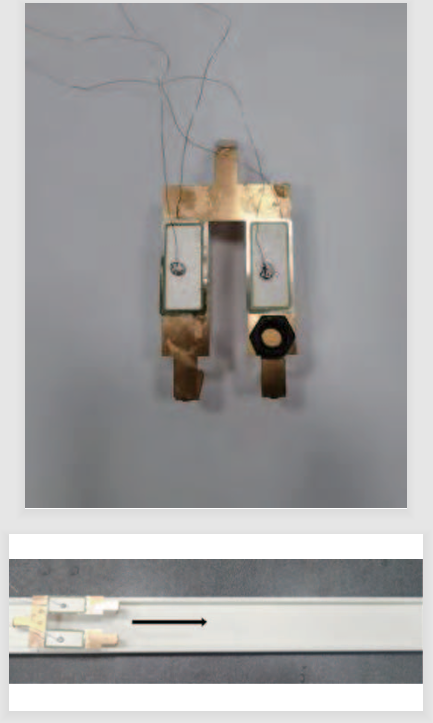
Based on the inverse piezoelectric effect of piezoelectric ceramics, a tripod crawling robot with variable cross-section bending beam support is designed. Through dynamic analysis and experimental verification, the effects of driving frequency, bending angle, load, and voltage waveform on motion direction and speed are studied, achieving left/right turning and approximately linear motion. This research serves as a reference for miniature crawling robot design and experimentation. ---
System Architecture
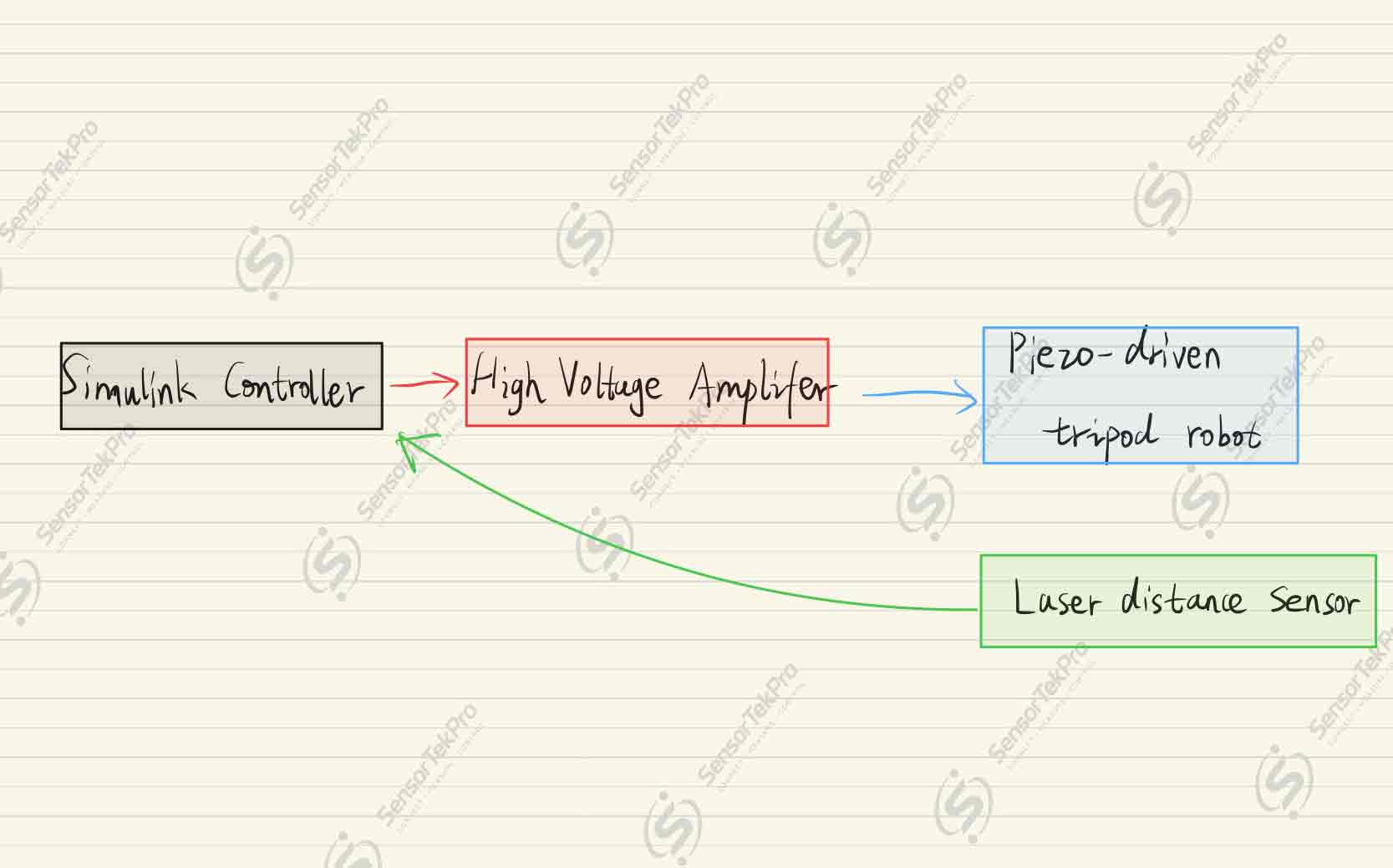
Signal flow summary: 1. **Controller** outputs signal to the high-voltage power amplifier. 2. **High-voltage amplifier (Ante ATA 300)** drives the piezoelectric tripod robot to produce motion in the specified direction. 3. **Panasonic laser displacement sensor** measures the displacement of the robot along the track and feeds back to the controller.
Experimental Setup
Hardware Configuration
| Component | Model |
|---|---|
| Laser Displacement Sensor | Panasonic HG-C1030 |
| High-Voltage Power Amplifier | Ante ATA 300 |
Platform Compatibility Note
This system was validated under QUARC / Simulink. The signal interfaces (analog voltage, encoder, digital I/O) are electrically compatible with real-time control platforms including dSPACE, Speedgoat, and NI systems.
Applicable Scenarios
- Graduate research: piezoelectric micro-robot motion control thesis experiments
- Micro-robotics: crawling locomotion dynamics and actuation testing
- HIL simulation: piezoelectric drive control algorithm validation
- Control course labs: PID control implementation on non-conventional actuators
Important Notice
This application example documents an actual lab setup and is provided for technical reference only. Hardware shown reflects the validated configuration used in this experiment; equivalent substitutions may be applicable for similar setups. Customers are responsible for final product selection and application suitability assessment.

















