Nonlinear Modeling and Control of Double-Mast Crane
crane · nonlinear underactuated system · input shaping control · anti-sway control · feedforward control · Simulink
Overview
This case presents the construction and implementation of a double-mast crane experimental platform with crane motion control, attitude measurement, and real-time feedback. The system architecture is modular with universal hardware interfaces, easy to reproduce and extend — suitable for experimental validation, engineering practice, and teaching demonstration of complex crane systems. ---
System Architecture
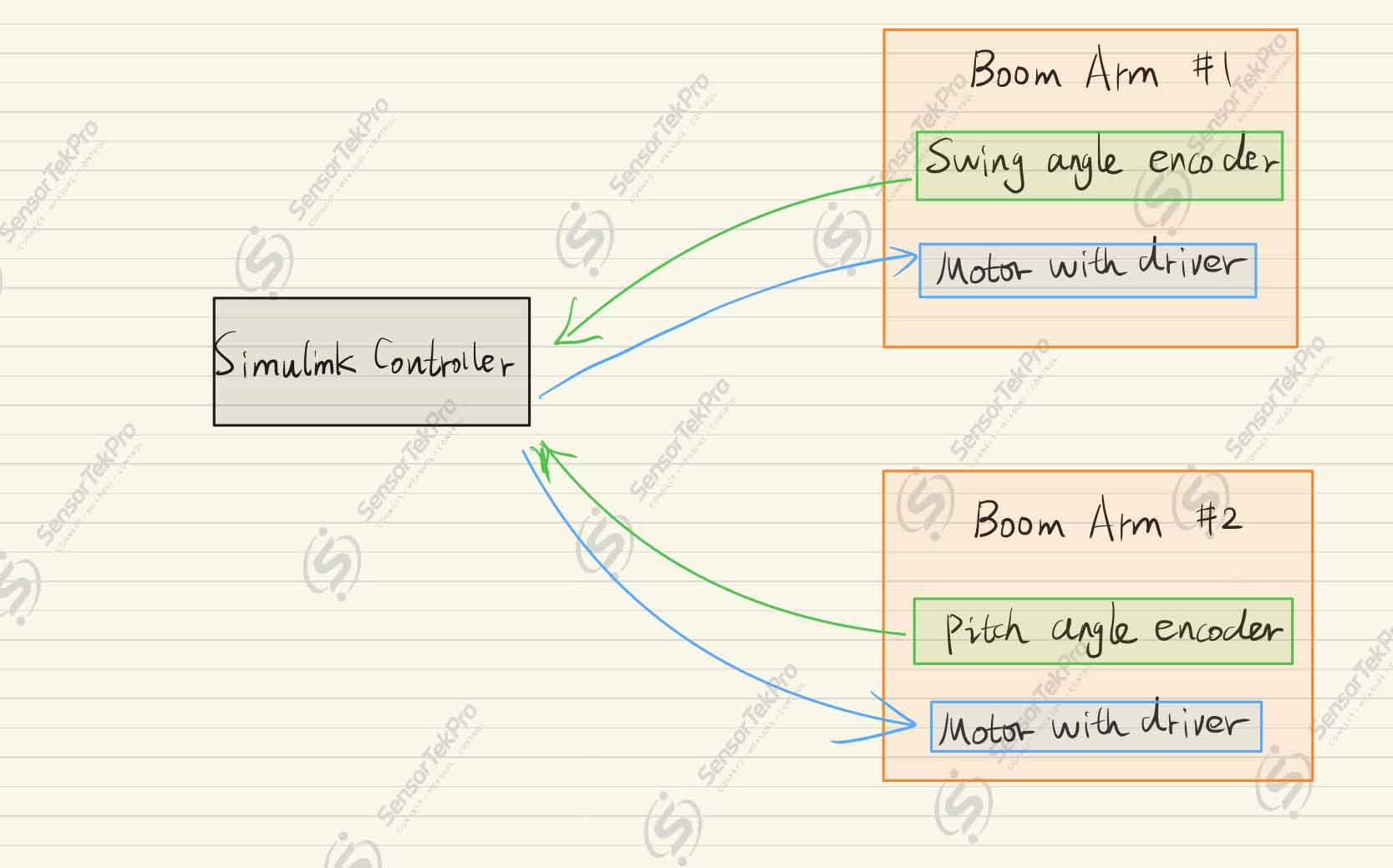
Signal flow summary:
- **Control signal:** Controller → motor driver → motor → crane.
- **Feedback signal:** Encoder (swing angle / pitch angle) → controller.
Experimental Setup
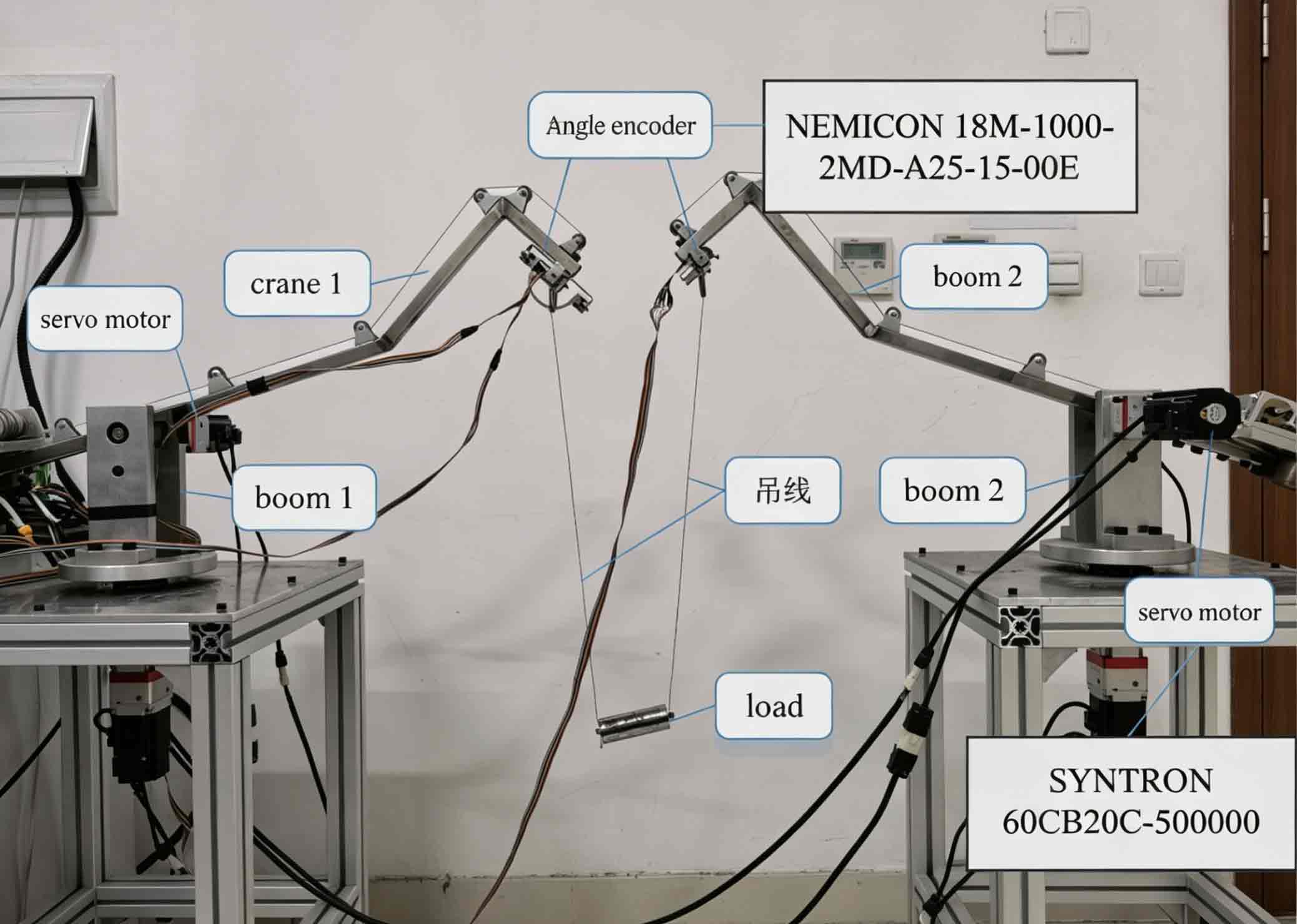
Hardware Configuration
| Component | Model |
|---|---|
| Servo Motor | SYNTRON 60CB20C-500000 |
| Encoder | NEMICON 18M-1000-2MD-A25-15-00E |
Platform Compatibility Note
This system was validated under QUARC / Simulink. The signal interfaces (analog voltage, encoder, digital I/O) are electrically compatible with real-time control platforms including dSPACE, Speedgoat, and NI systems.
Applicable Scenarios
- Graduate research: underactuated crane anti-sway control thesis experiments
- Industrial automation: crane motion control and payload swing suppression
- HIL simulation: input shaping and feedforward control validation
- Control course labs: nonlinear underactuated system modeling and control
Important Notice
This application example documents an actual lab setup and is provided for technical reference only. Hardware shown reflects the validated configuration used in this experiment; equivalent substitutions may be applicable for similar setups. Customers are responsible for final product selection and application suitability assessment.

















