Robust Finite-Time Control of Robotic Arm Under Base Vibration
robotic arm · vibration excitation · stabilization control · load variation · implicit Lyapunov function · Simulink
Overview
This case targets a two-link robotic arm subject to base vibration and load variation. A robust finite-time controller is designed and tested on a two-link arm experimental setup. The system achieves fast positioning to target positions with strong disturbance rejection capability, serving as a reference for control implementation and experimental setup. ---
System Architecture
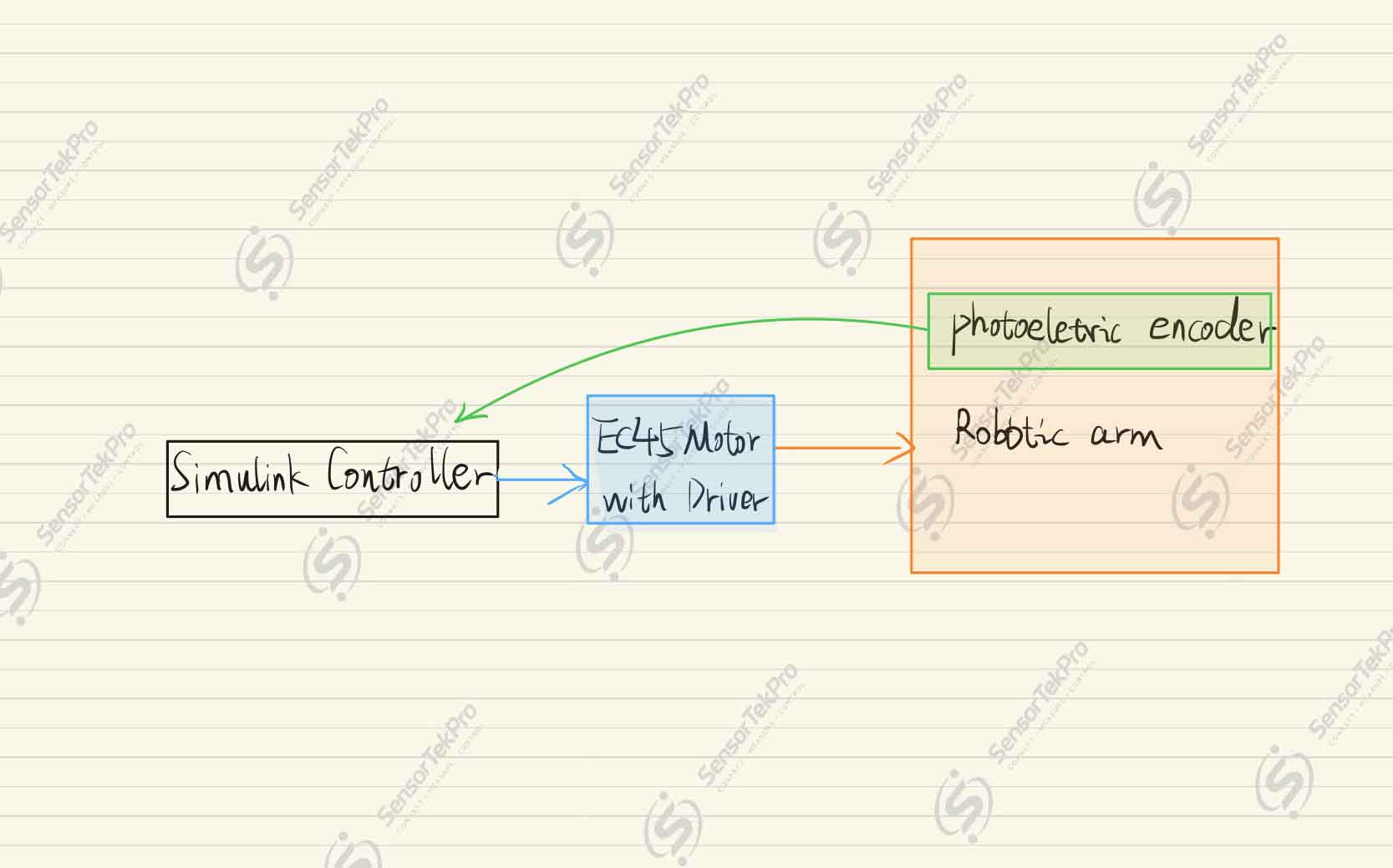
Signal flow summary:
- PC → DC motor (crank-slider mechanism) → vibrating base → laser displacement sensor → PC.
- PC issues vibration command → motor drives crank-slider → base generates vibration → displacement sensor measures → PC acquires data.
Experimental Setup
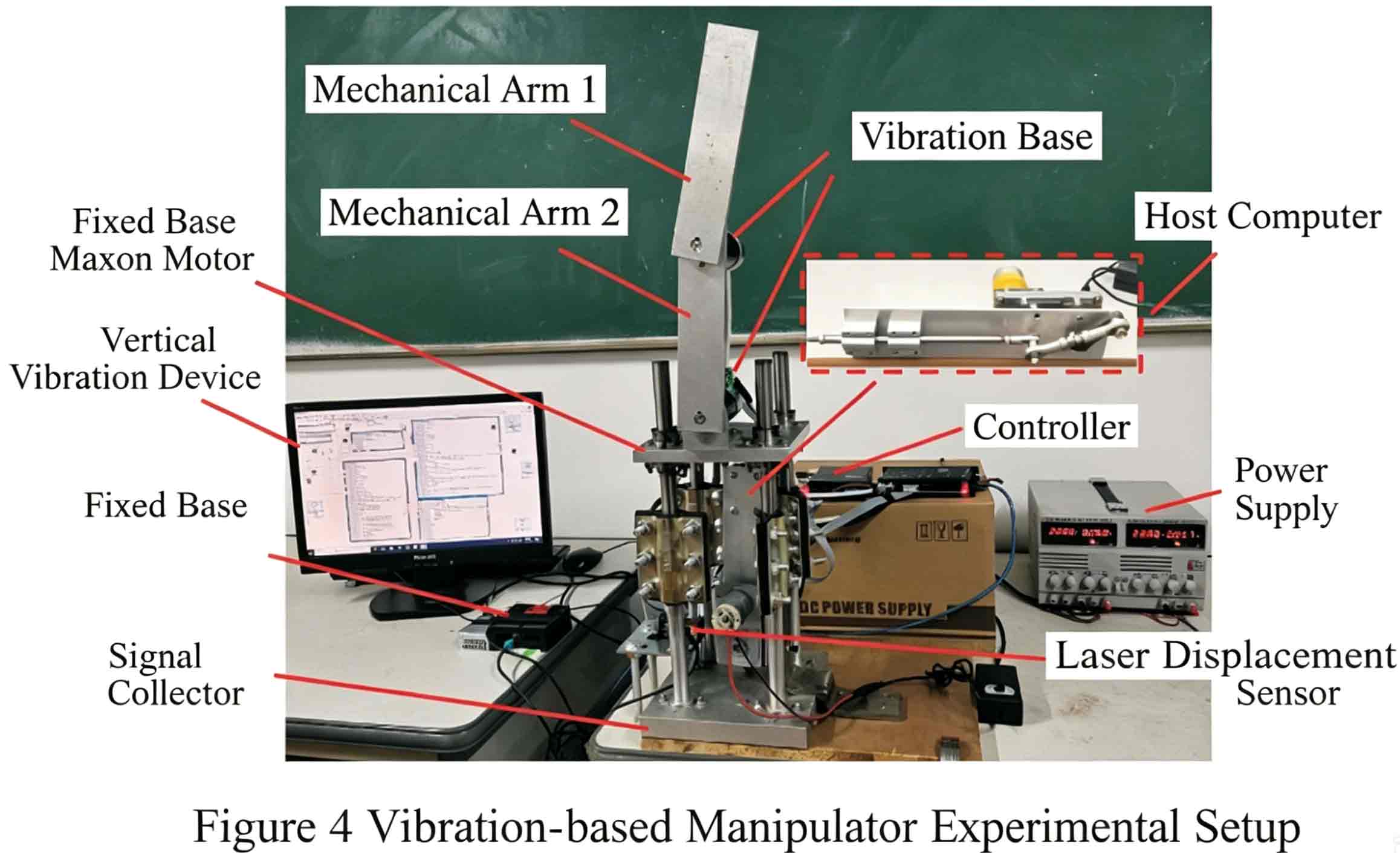
Hardware Configuration
| Component | Model |
|---|---|
| DC Brushless Motor | Maxon EC45 |
| Laser Displacement Sensor | Panasonic HG-C1400 |
| Optical Encoder | Broadcom HEDL-5540 |
Platform Compatibility Note
This system was validated under QUARC / Simulink. The signal interfaces (analog voltage, encoder, digital I/O) are electrically compatible with real-time control platforms including dSPACE, Speedgoat, and NI systems.
Applicable Scenarios
- Graduate research: vibration-resistant robot arm control thesis experiments
- Robotics: finite-time stabilization under external disturbance
- HIL simulation: robust controller validation with real motor and encoder hardware
- Control course labs: implicit Lyapunov function control with base disturbance injection
Important Notice
This application example documents an actual lab setup and is provided for technical reference only. Hardware shown reflects the validated configuration used in this experiment; equivalent substitutions may be applicable for similar setups. Customers are responsible for final product selection and application suitability assessment.

















