Robust Position Control of Electro-Hydrostatic Actuator (EHA) under Uncertainty
EHA · electro-hydrostatic actuator · robust control · hydrostatic drive · QFT · Teknic M-4650
Overview
This case addresses parameter uncertainty, leakage, and friction nonlinearity in an EHA system. A QFT-based robust position controller with compensation methods was designed and experimentally validated, demonstrating significant improvement in system tracking performance. ---
System Architecture
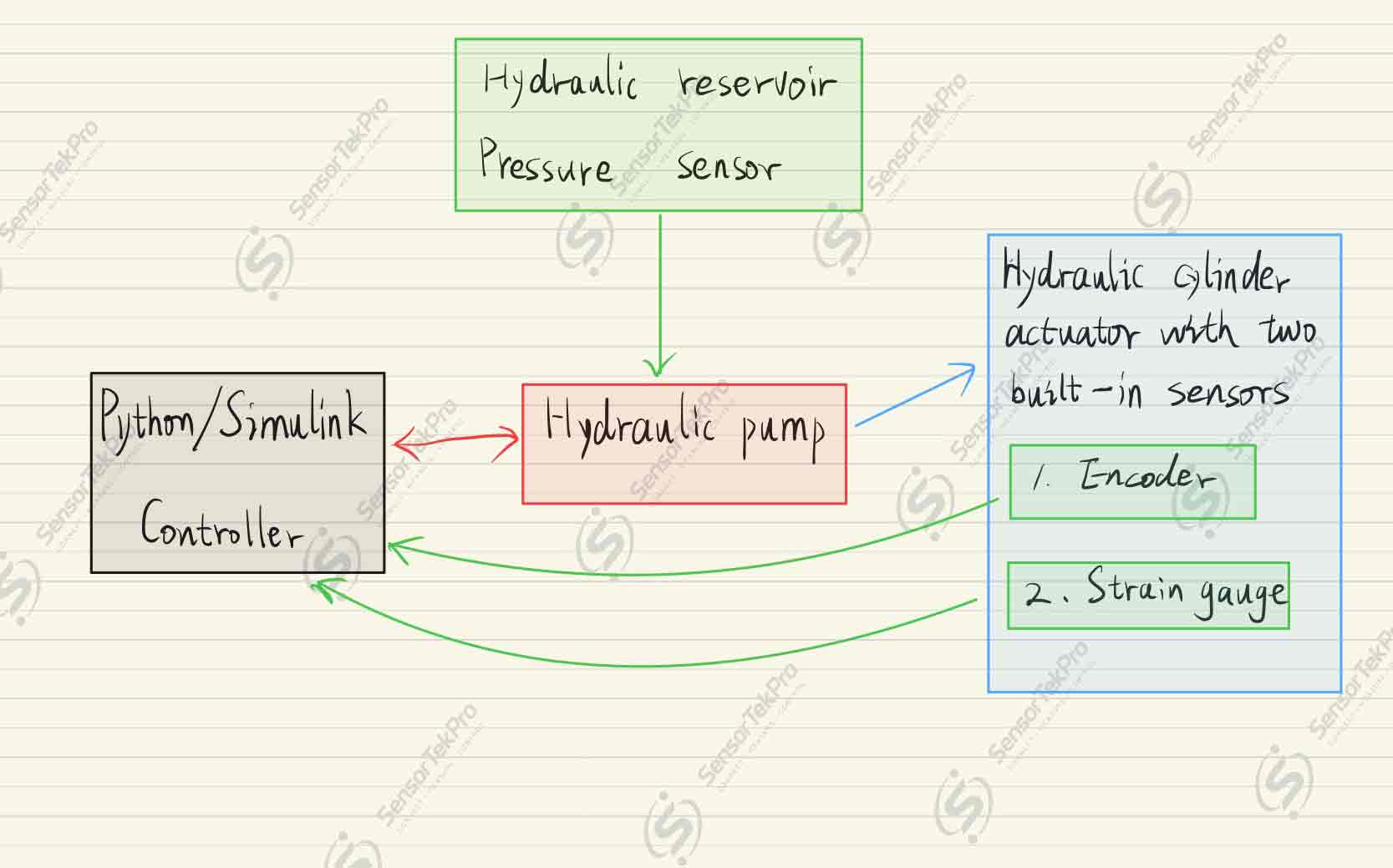
Signal flow summary: 1. **Controller** sends position command to the motor. 2. **Motor** receives command, rotates, and drives the hydraulic pump. 3. **Hydraulic pump** converts motor rotation into hydraulic flow and pressure. 4. **Hydraulic cylinder (actuator)** receives flow and produces displacement, pushing the load. 5. **Encoder on actuator** measures piston displacement, feeds back to controller. 6. **Pressure sensor on actuator** measures cylinder pressure, feeds back force information. 7. **Tank** stores hydraulic fluid and buffers pressure fluctuations. 8. **Tank pressure sensor** monitors fluid pressure to ensure system health and stability.
Experimental Setup
Hardware Configuration
| Component | Model |
|---|---|
| Servo Motor | Teknic M-4650 |
| Hydraulic Pump / Motor | Parker F11-005 |
| Hydraulic Cylinder | Parker D1FP |
| Encoder | Heidenhain ROD 420 |
| Tank Pressure Sensor | Honeywell PX3 |
| Strain Gauge Pressure Sensor | MeasureX MRA25 |
Platform Compatibility Note
This system was validated under QUARC / Simulink. The signal interfaces (analog voltage, encoder, digital I/O) are electrically compatible with real-time control platforms including dSPACE, Speedgoat, and NI systems.
Applicable Scenarios
- Graduate research: EHA robust control and nonlinear compensation thesis experiments
- HIL simulation: hydraulic actuator position tracking validation
- Aerospace / industrial: electro-hydrostatic actuation system testing
- Control course labs: QFT robust controller design and verification
Important Notice
This application example documents an actual lab setup and is provided for technical reference only. Hardware shown reflects the validated configuration used in this experiment; equivalent substitutions may be applicable for similar setups. Customers are responsible for final product selection and application suitability assessment.

















