Heave Compensation Performance Optimization with Fuzzy PI Control
heave compensation · fuzzy PI control · HIL simulation · Quanser Hexapod · real-time control · Panasonic servo · laser displacement sensor · dSPACE · Speedgoat · NI
Overview
This case documents a heave compensation experimental platform built for evaluating adaptive control strategies under simulated sea-state conditions. A fuzzy PI controller was designed to address the limited adaptability of conventional PI control in complex wave environments. Fuzzy rules enable online self-tuning of PI parameters, achieving adaptive optimization without manual re-parameterization. Results across multiple wave periods and amplitudes show that the fuzzy PI controller outperforms conventional PI in compensation accuracy, adaptability, and system stability. ---
System Architecture
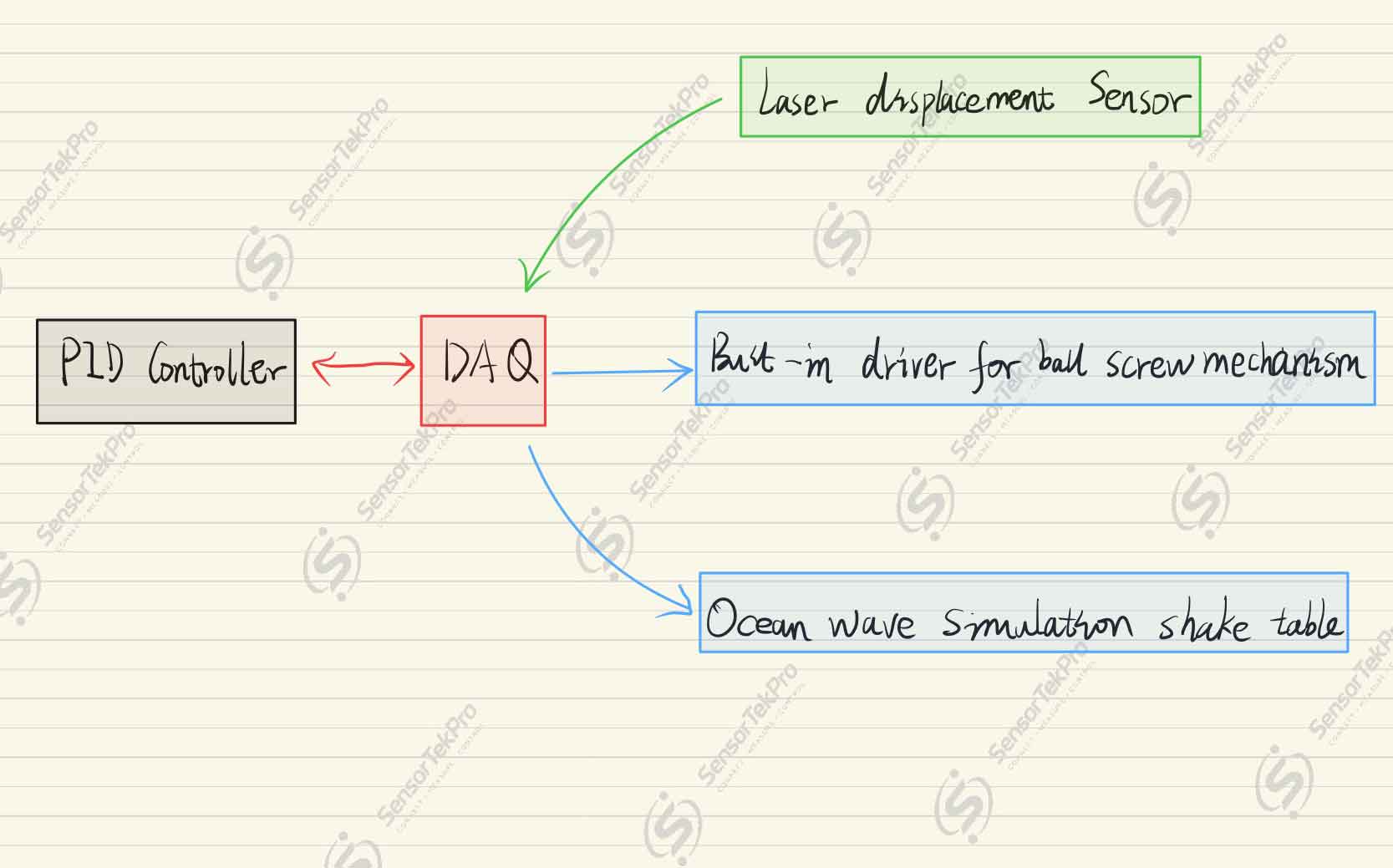
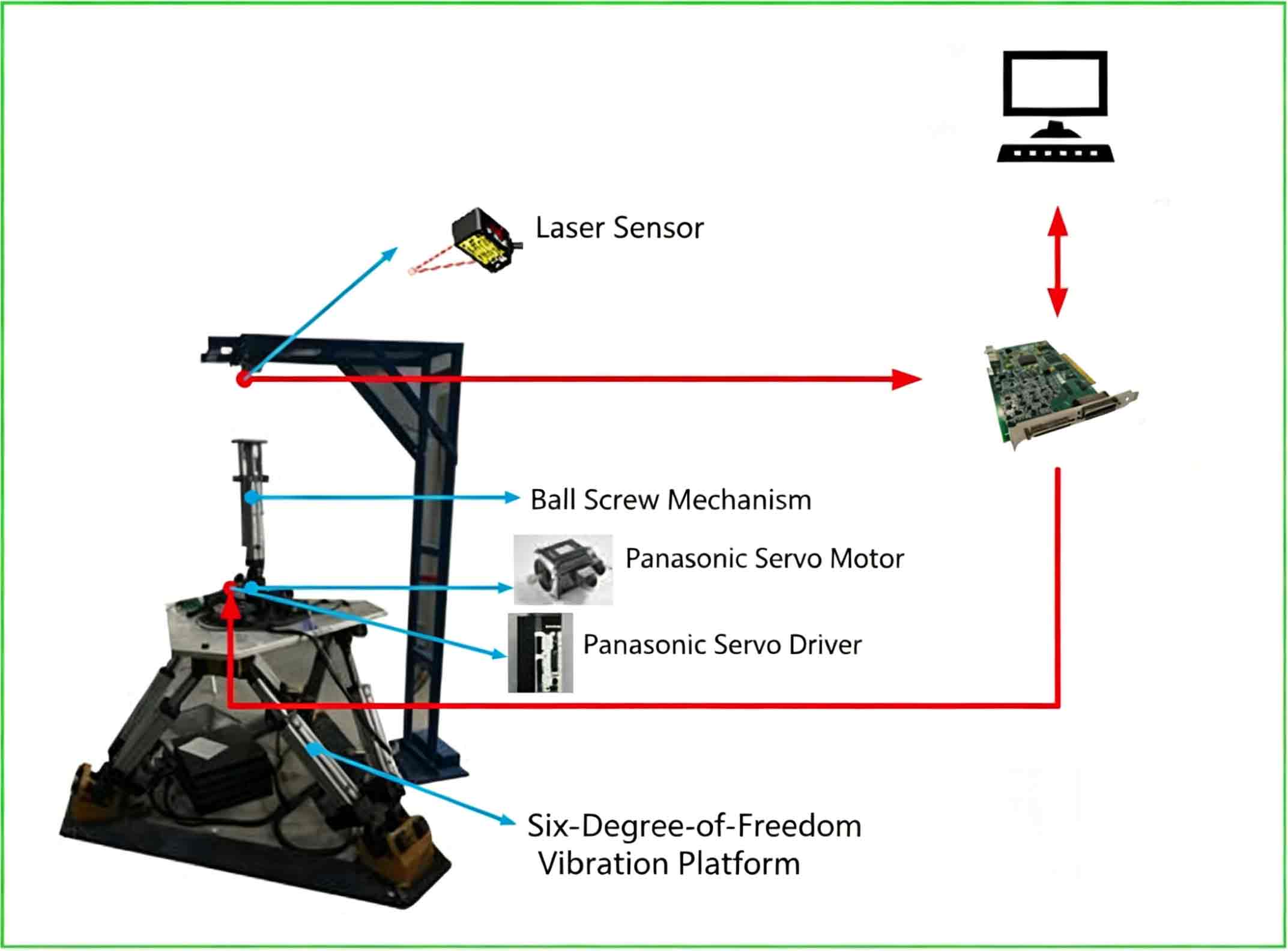
Signal flow summary:
- The 6-DOF vibration platform simulates ocean wave motion, driving a ball-screw mechanism in the vertical axis.
- A non-contact laser displacement sensor (Panasonic HG-C1400) continuously measures vertical displacement of the screw.
- Sensor signals feed into the DAQ system and are processed in real time by the controller under QUARC / Simulink.
- The controller outputs direction and velocity commands to the servo driver, closing the compensation loop.
Experimental Setup
Hardware Configuration
| Component | Model |
|---|---|
| 6-DOF Vibration Platform | Quanser Hexapod |
| Servo Driver | Panasonic MBDHT2510E |
| Servo Motor | Panasonic MHMD042G1U |
| Laser Displacement Sensor | Panasonic HG-C1400 |
Platform Compatibility Note
This system was validated on the Quanser platform under QUARC / Simulink. The signal interfaces (analog voltage, encoder, digital I/O) are electrically compatible with real-time control platforms including dSPACE, Speedgoat, and NI systems.
Applicable Scenarios
- Graduate research: motion control and vibration compensation thesis experiments
- HIL simulation: heave compensation algorithm validation on real hardware
- Offshore equipment simulation: wave disturbance rejection testing
- Control course labs: adaptive vs. conventional PI comparison
Important Notice
This application example documents an actual lab setup and is provided for technical reference only. Hardware shown reflects the validated configuration used in this experiment; equivalent substitutions may be applicable for similar setups. Customers are responsible for final product selection and application suitability assessment.

















