Precise Linear Motion Control Using Kollmorgen AKM24F Brushless Motor
Kollmorgen AKM24F · ball-screw platform · three-phase brushless motor · vibration control · Simulink · Omron EE-SPY415
Overview
This vibration table experimental system uses a host PC (DAQ) to control a power amplifier driving a Kollmorgen AKM24F brushless motor, achieving precise linear displacement of a ball-screw platform. The motor's internal encoder provides real-time displacement feedback, an accelerometer monitors motion state, and limit switches ensure travel safety. Through closed-loop control, the host PC precisely adjusts motor current to achieve high-accuracy displacement and acceleration measurement. ---
System Architecture
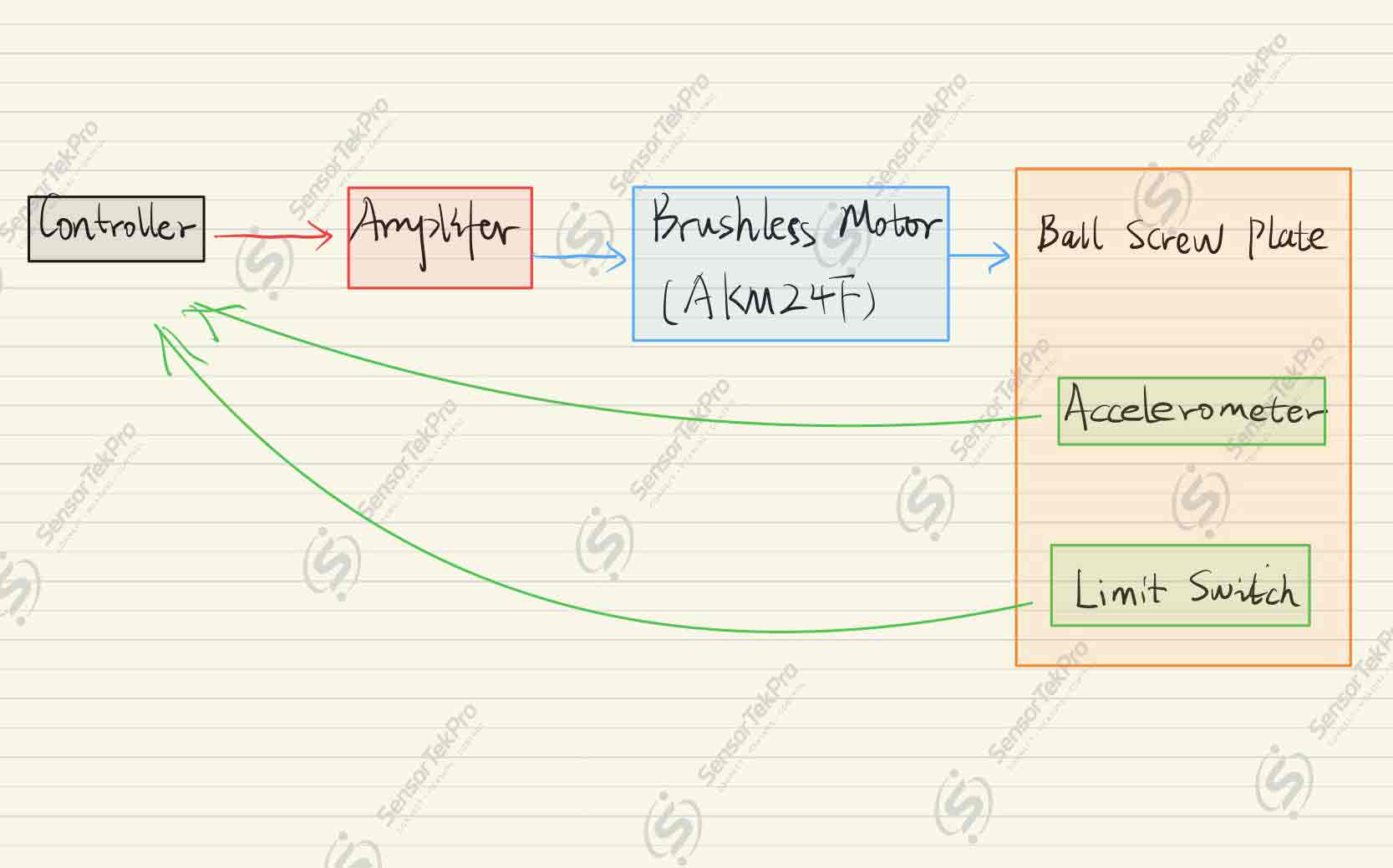
Signal flow summary:
- Generates control signal ±10V (corresponding to ±20A output).
- Receives encoder, accelerometer, and limit switch feedback.
- Receives ±10V control signal.
- Outputs corresponding current to Kollmorgen AKM24F motor via DC bus + PWM bridge.
- Motor generates torque proportional to current, drives ball-screw (1 inch pitch).
- Encoder detects rotation angle → converted to linear displacement.
- Converts rotation to linear displacement.
- Accelerometer measures platform acceleration.
- Limit switches detect travel end points.
- Host PC receives encoder displacement, acceleration, and limit switch status.
- Adjusts output signal → power amplifier → motor.
Experimental Setup
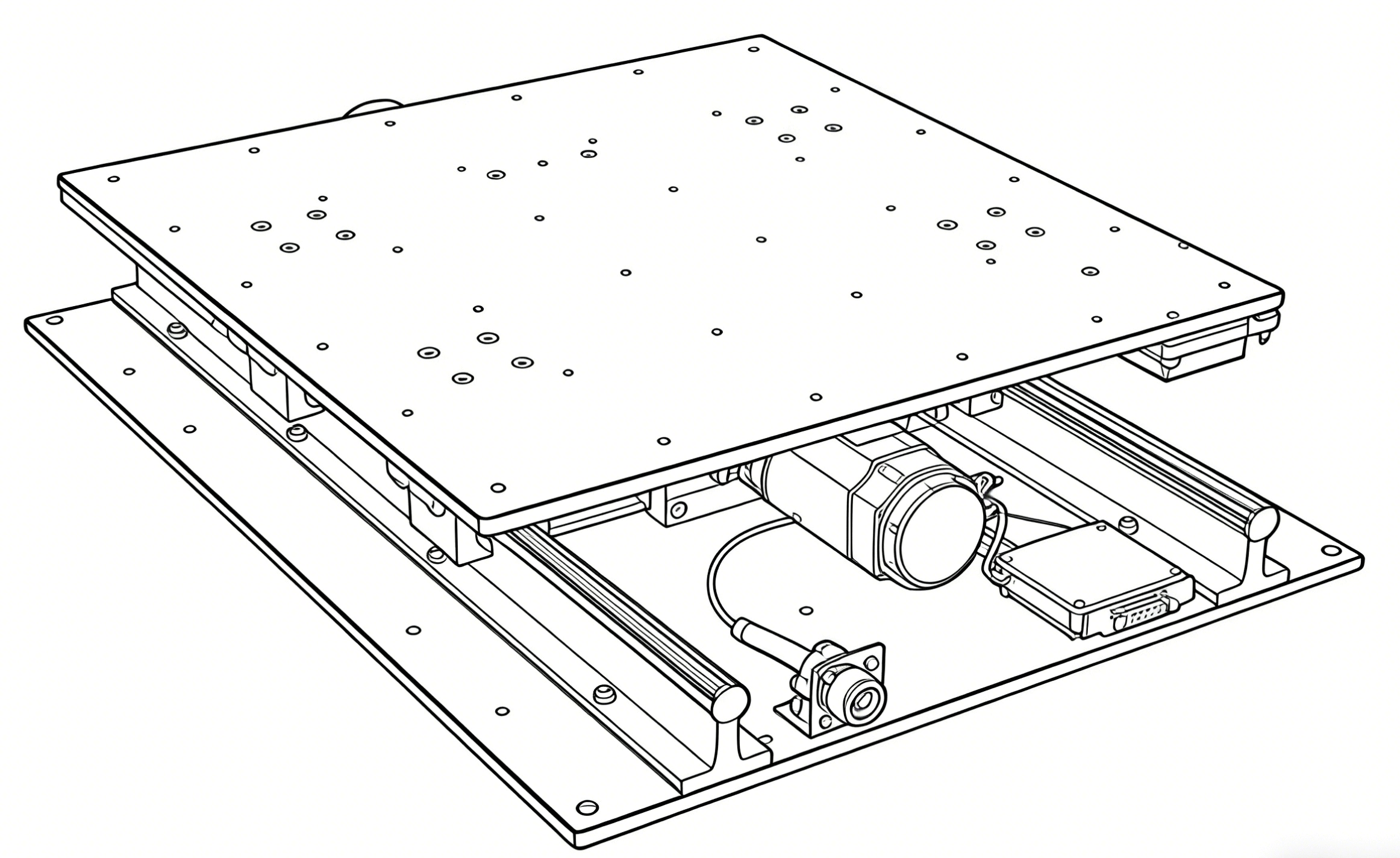
Hardware Configuration
| Component | Model |
|---|---|
| Three-Phase Brushless Motor | Kollmorgen AKM24F |
| Accelerometer Module | ADXL325 |
| Travel Limit Switch | Omron EE-SPY415 |
Platform Compatibility Note
This system was validated under QUARC / Simulink. The signal interfaces (analog voltage, encoder, digital I/O) are electrically compatible with real-time control platforms including dSPACE, Speedgoat, and NI systems.
Applicable Scenarios
- Graduate research: brushless motor linear motion control thesis experiments
- Vibration testing: precise excitation platform construction and characterization
- HIL simulation: closed-loop motion control with real encoder feedback
- Control course labs: current-controlled servo system with position and acceleration feedback
Important Notice
This application example documents an actual lab setup and is provided for technical reference only. Hardware shown reflects the validated configuration used in this experiment; equivalent substitutions may be applicable for similar setups. Customers are responsible for final product selection and application suitability assessment.

















