Multi-Tank Liquid Level Closed-Loop Control
HIL simulation · PWM · liquid level sensor · liquid level control · closed-loop control · multi-tank system
Overview
This project implements a four-tank liquid level control experimental system based on hardware-in-the-loop simulation, integrating liquid level measurement, PWM pump drive, and disturbance injection. The platform is suitable for control algorithm teaching and experimental validation. ---
System Architecture
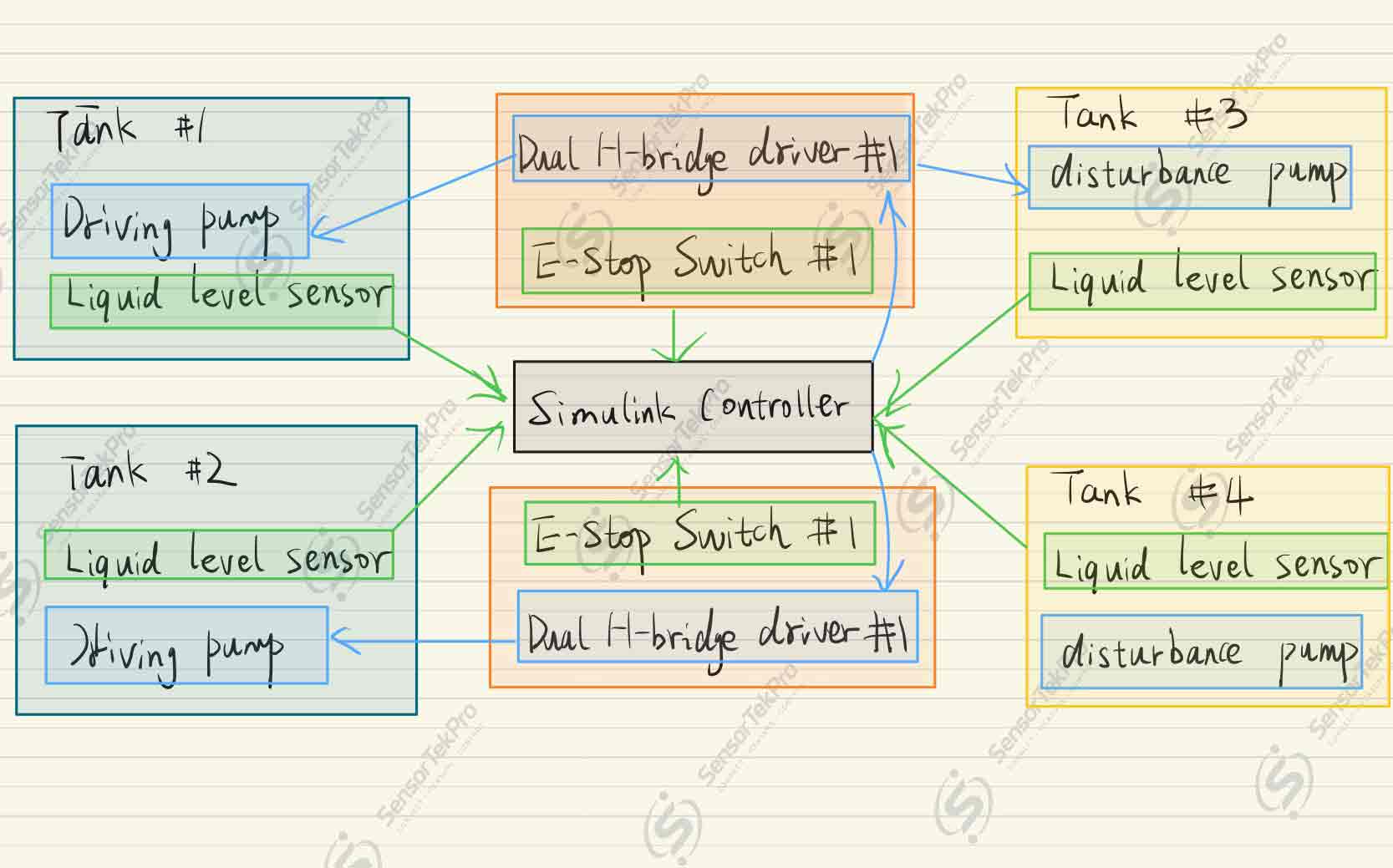
Signal flow summary: 1. Tank liquid level changes → acts on liquid level sensor. 2. Liquid level sensor → outputs analog voltage signal. 3. Analog voltage signal → sent to controller. 4. Controller → outputs PWM signal. 5. PWM signal → dual H-bridge driver → pump → generates disturbance. 6. PWM signal → dual H-bridge driver → pump → adjusts water flow rate.
Experimental Setup

Hardware Configuration
| Component | Model |
|---|---|
| Brushless DC Submersible Pump | Velleman VMA421 |
| Motor Driver | L298N Dual H-Bridge Module |
| Resistive Liquid Level Sensor | Milone Technologies PN-12110215TC-12 |
| Emergency Stop Switch | E-Stop |
Platform Compatibility Note
This system was validated under QUARC / Simulink. The signal interfaces (analog voltage, encoder, digital I/O) are electrically compatible with real-time control platforms including dSPACE, Speedgoat, and NI systems.
Applicable Scenarios
- Graduate research: liquid level control and multi-variable system thesis experiments
- Process control: coupled tank system for MIMO control algorithm testing
- HIL simulation: closed-loop liquid level control with real pump hardware
- Control course labs: disturbance injection and rejection experiment
Important Notice
This application example documents an actual lab setup and is provided for technical reference only. Hardware shown reflects the validated configuration used in this experiment; equivalent substitutions may be applicable for similar setups. Customers are responsible for final product selection and application suitability assessment.

















